
{kind=link}
[ad_1]

Congratulations to the winners of the perfect paper award of the Worldwide Affiliation for Automation and Robotics in Building 2021. The workforce round Cynthia Brosque, Elena Galbally, Prof. Martin Fischer, and Prof. Oussama Khatib did wonderful groundwork for building robotics. With permission, Silicon Valley Robotics is reposting the primary elements of the paper beneath. It’s also obtainable on the IAARC web site.
GOLDBECK US Inc. helped outline building robotics use-cases that generate real-world worth on their job websites. Within the first section of the venture, they collected knowledge to know the duties on website holistically. Subsequently, simulations on how robots carry out the job had been created. Utilizing this info, the researchers of Stanford College | CIFE – Heart for Built-in Facility Engineering then developed appropriate robotic prototypes. GOLDBECK equipped bodily constructing parts to check the prototypes underneath life like circumstances.
GOLDBECK is now looking for robotics firms to assist us transition this analysis right into a real-world robotic utility!
Summary
Resulting from their unstructured and dynamic nature, building websites current many challenges for robotic automation of duties. Integrating human-robot collaboration (HRC) is vital for process success and implementation feasibility. That is notably necessary for contact-rich duties and different advanced situations which require a degree of reasoning that can’t be completed by a totally autonomous robotic. At the moment, many options depend on exact teleoperation that requires one operator per robotic. Alternatively, one operator could oversee a number of semi-autonomous robots. Nevertheless, the operators wouldn’t have the sensory suggestions wanted to adequately leverage their experience and craftsmanship. Haptic interfaces enable for intuitive human-robot collaboration by offering wealthy contact suggestions. This paper presents two human-robot collaboration options for welding and joint sealing by using a haptic gadget. Our method permits for seamless transitions between autonomous robotic capabilities and human intervention with wealthy contact suggestions. Moreover, this work opens the door to intuitive programming of latest duties by haptic human demonstration.

1 Introduction
In recent times, progress in mobility, manipulation expertise, and AI reasoning have began to allow using robots in area, underwater, properties, agriculture, and building [1]. A very necessary space of curiosity is the automation of harmful, strenuous, and laborintensive duties [2].
Building websites are particularly difficult environments for autonomous robots due to their extremely unpredictable and unstructured nature [3, 4]. Therefore, absolutely autonomous robots that substitute human labor are usually not probably the most possible or best resolution. Nearly all of present approaches depend on a human operator that oversees a single process autonomous robotic. The operator receives solely visible suggestions and is proscribed in the kind of enter and restoration from failure he can present because of the lack of an intuitive interface to take action. [4] attributed this lack in technical flexibility of building robots to the truth that early building options imitated programs initially developed for industrial fabrication [5].
Some duties are structured sufficient to be autonomously carried out by a robotic with little human enter, however many require a extra versatile method that includes a better diploma of human reasoning and instinct [6]. Given this actuality, a technique to design building robots ought to be versatile sufficient to permit various ranges of human-robot collaboration relying on the duty.
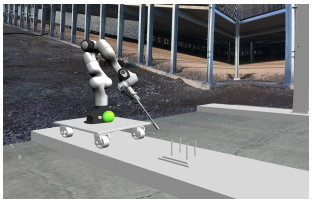
Haptic gadgets (Fig.1) present an efficient interface for collaboration by permitting the human to (1) really feel the contact forces between the robotic’s end-effector and the atmosphere [7], and (2) simply intervene and management the robotic movement in situations that the autonomous behaviors are usually not in a position to deal with efficiently [8]. Moreover, knowledge from these haptic interventions will be collected and used to study new autonomous expertise. Distant robotic management utilizing a haptic interface has been examined in fields resembling surgical procedure [9] and underwater exploration [1], however has not but been extensively carried out in building.
In earlier work, the authors explored human-robot collaboration options to 5 hazardous and repetitive building duties: putting in drywall, portray, bolting, welding, and sealing precast concrete slab joints [10]. Our business accomplice, Goldbeck, was serious about automating these meeting and ending duties that require on-site, repetitive guide effort, ergonomically difficult positions, and dealing from harmful heights. [10] outlines a technique for designing collaborative robotic options with haptic suggestions and to evaluate their feasibility in simulation.
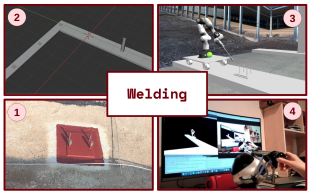
 On this paper, we deal with two of the beforehand explored duties (metal welding and sealing precast concrete joints) and apply the aforementioned technique to design extra versatile collaborative options. Totally different from [10], we suggest relying totally on the robotic’s purposeful autonomy and utilizing haptics as an efficient and intuitive method to intervene in unexplored or failure situations. Pressure knowledge from the restoration technique employed by the operator will be recorded and used to study from demonstration and increase the robotic’s autonomy. Over time, the robotic would require much less human intervention. This larger diploma of autonomy may enable a single operator to oversee many robots directly, overcoming the issues of teleoperation through which one operator per robotic is required.
On this paper, we deal with two of the beforehand explored duties (metal welding and sealing precast concrete joints) and apply the aforementioned technique to design extra versatile collaborative options. Totally different from [10], we suggest relying totally on the robotic’s purposeful autonomy and utilizing haptics as an efficient and intuitive method to intervene in unexplored or failure situations. Pressure knowledge from the restoration technique employed by the operator will be recorded and used to study from demonstration and increase the robotic’s autonomy. Over time, the robotic would require much less human intervention. This larger diploma of autonomy may enable a single operator to oversee many robots directly, overcoming the issues of teleoperation through which one operator per robotic is required.
2 Associated Work
Whereas factories have sometimes separated staff from robots attributable to security issues, human-robot collaboration can’t be neglected in building, as robots and people share one workspace [2]. This requires devising options that enable us to successfully mix the employees’ experience with the robots’ autonomous expertise.
Building literature has studied using teleoperation gadgets [11, 12, 7], notably specializing in building equipment, resembling excavators. These options typically contain cameras for visible suggestions and GPS sensors for navigation, which will be enough to perform low dexterity duties with elevated operator security. Nevertheless, [7] states that advanced duties involving contact drastically profit from extra sensory suggestions resembling tactile info. Moreover, teleoperation options rely closely on the operator’s steerage and don’t absolutely exploit the autonomous capabilities of the robotic.
 A special set of collaborative options at the moment used onsite have semi-autonomous robots with a human supervisor that oversees the duties resembling drywall set up, concrete drilling, and structure [13]. The supervisor can present easy inputs to the robotic, resembling when to start out or cease the operation, whereas the robotic handles the remainder of the duty. This method makes higher use of contemporary robotics capabilities and permits a single operator to handle a number of robots. Nevertheless, the interfaces used to supply inputs to the robotic are sometimes too simplistic to permit restoration from failure.
A special set of collaborative options at the moment used onsite have semi-autonomous robots with a human supervisor that oversees the duties resembling drywall set up, concrete drilling, and structure [13]. The supervisor can present easy inputs to the robotic, resembling when to start out or cease the operation, whereas the robotic handles the remainder of the duty. This method makes higher use of contemporary robotics capabilities and permits a single operator to handle a number of robots. Nevertheless, the interfaces used to supply inputs to the robotic are sometimes too simplistic to permit restoration from failure.
Within the occasion of a robotic failure throughout process execution, joysticks and management pendants don’t all the time present sufficient suggestions for the operator to intervene in an efficient means that allows well timed process completion. Moreover, there may be at the moment no streamlined method to study from the operator’s intervention and use this knowledge to enhance the robotic’s autonomous capabilities.
By permitting the operator to really feel the contact between the robotic and its atmosphere, haptic gadgets enhance the vary of situations through which the operator can support in failure restoration [14]. Moreover, we will simply report each pressure and place knowledge throughout the operator’s intervention. These human demonstrations of restoration methods can enable the robotic to study new expertise [15] and increase its purposeful autonomy.
Haptic gadgets have been utilized by the development business together with digital actuality for process coaching functions [16]. The know-how has allowed staff to coach in a protected atmosphere with life like process circumstances. Nevertheless, haptics are nonetheless a novel know-how in building purposes and subject use has not been reported.
Present algorithms for haptic management of robots [17] can deal with massive communication delays, making them efficient interfaces for distant intervention at lengthy distances. In [1] an operator haptically controls an underwater ocean exploration robotic from a distance of 100m.
 Lastly, [18] gives an instance that integrates two modalities of robotic management: autonomous robotic habits and skilled human-guided movement interactions. On this research, a gaggle of cellular robotic arms efficiently put in drywall boards in simulation with versatile human intervention.
Lastly, [18] gives an instance that integrates two modalities of robotic management: autonomous robotic habits and skilled human-guided movement interactions. On this research, a gaggle of cellular robotic arms efficiently put in drywall boards in simulation with versatile human intervention.
This physique of prior work illustrates how retaining the human within the loop with satisfactory suggestions can facilitate profitable process automation in advanced, unstructured environments. Furthermore, it highlights the worth of haptics as a means to supply a versatile and efficient interface for human-robot collaboration in addition to educating robots new autonomous expertise.
tags: c-Analysis-Innovation

Silicon Valley Robotics
is an business affiliation supporting innovation and commercialization of robotics applied sciences.
Silicon Valley Robotics
is an business affiliation supporting innovation and commercialization of robotics applied sciences.

Andra Keay
is the Managing Director of Silicon Valley Robotics, founding father of Girls in Robotics and is a mentor, investor and advisor to startups, accelerators and assume tanks, with a powerful curiosity in commercializing socially optimistic robotics and AI.
Andra Keay
is the Managing Director of Silicon Valley Robotics, founding father of Girls in Robotics and is a mentor, investor and advisor to startups, accelerators and assume tanks, with a powerful curiosity in commercializing socially optimistic robotics and AI.
[ad_2]