
{kind=link}
[ad_1]

By Alexander Badri-Sprowitz, Alborz Aghamaleki Sarvestani, Metin Sitti and Linda Behringer
If a Tyrannosaurus Rex residing 66 million years in the past featured the same leg construction as an ostrich working within the savanna right this moment, then we are able to assume hen legs stood the take a look at of time – a great instance of evolutionary choice.
Swish, elegant, highly effective – flightless birds just like the ostrich are a mechanical surprise. Ostriches, a few of which weigh over 100kg, run by means of the savanna at as much as 55km/h. The ostrich’s excellent locomotor efficiency is regarded as enabled by the animal’s leg construction. In contrast to people, birds fold their ft again when pulling their legs up in the direction of their our bodies. Why do the animals do that? Why is that this foot motion sample energy-efficient for strolling and working? And might the hen’s leg construction with all its bones, muscle tissues, and tendons be transferred to strolling robots?
Alexander Badri-Spröwitz has spent greater than 5 years on these questions. On the Max Planck Institute for Clever Techniques (MPI-IS), he leads the Dynamic Locomotion Group. His staff works on the interface between biology and robotics within the subject of biomechanics and neurocontrol. The dynamic locomotion of animals and robots is the group’s predominant focus.
Collectively together with his doctoral pupil Alborz Aghamaleki Sarvestani, Badri-Spröwitz has constructed a robotic leg that, like its pure mannequin, is energy-efficient: BirdBot wants fewer motors than different machines and will, theoretically, scale to giant measurement. On March sixteenth, Badri-Spröwitz, Aghamaleki Sarvestani, the roboticist Metin Sitti, a director at MPI-IS, and biology professor Monica A. Daley of the College of California, Irvine, revealed their analysis within the famend journal Science Robotics.
Compliant spring-tendon community made from muscle tissues and tendons
When strolling, people pull their ft up and bend their knees, however ft and toes level ahead nearly unchanged. It’s recognized that Birds are totally different — within the swing part, they fold their ft backward. However what’s the perform of this movement? Badri-Spröwitz and his staff attribute this motion to a mechanical coupling. “It’s not the nervous system, it’s not electrical impulses, it’s not muscle exercise,” Badri-Spröwitz explains. “We hypothesized a brand new perform of the foot-leg coupling by means of a community of muscle tissues and tendons that extends throughout a number of joints”. These multi-joint muscle-tendon coordinate foot folding within the swing part. In our robotic, we have now applied the coupled mechanics within the leg and foot, which permits energy-efficient and sturdy robotic strolling. Our outcomes demonstrating this mechanism in a robotic lead us to imagine that related effectivity advantages additionally maintain true for birds,” he explains.

The coupling of the leg and foot joints and the forces and actions concerned might be the explanation why a big animal like an ostrich can’t solely run quick but additionally stand with out tiring, the researchers speculate. An individual weighing over 100kg may also stand properly and for a very long time, however solely with the knees ‘locked’ in an prolonged place. If the particular person have been to squat barely, it turns into strenuous after a couple of minutes. The hen, nonetheless, doesn’t appear to thoughts its bent leg construction; many birds even stand upright whereas sleeping. A robotic hen’s leg ought to have the ability to do the identical: no motor energy needs to be wanted to maintain the construction standing upright.
Robotic walks on treadmill
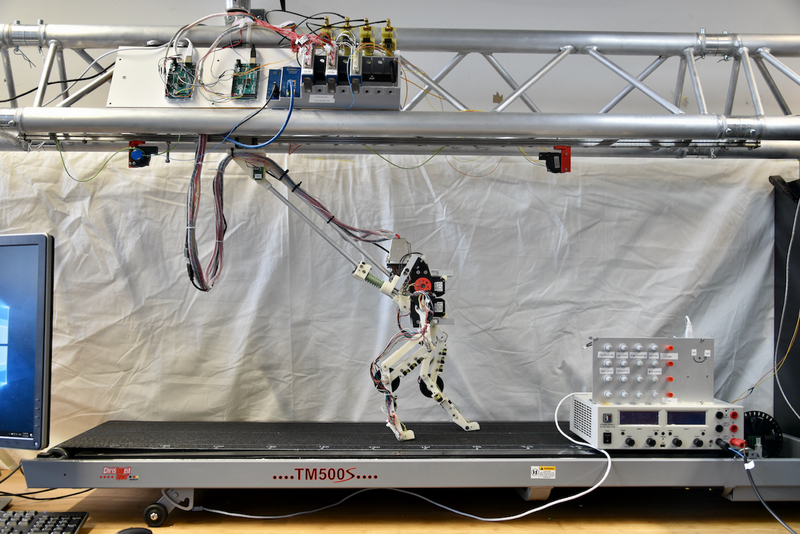
To check their speculation, the researchers constructed a robotic leg modeled after the leg of a flightless hen. They constructed their synthetic hen leg in order that its foot options no motor, however as an alternative a joint outfitted with a spring and cable mechanism. The foot is mechanically coupled to the remainder of the leg’s joints by means of cables and pulleys. Every leg accommodates solely two motors— the hip joints motor, which swings the leg forwards and backwards, and a small motor that flexes the knee joint to drag the leg up. After meeting, the researchers walked BirdBot on a treadmill to look at the robotic’s foot folding and unfolding. “The foot and leg joints don’t want actuation within the stance part,” says Aghamaleki Sarvestani. “Springs energy these joints, and the multi-joint spring-tendon mechanism coordinates joint actions. When the leg is pulled into swing part, the foot disengages the leg’s spring – or the muscle-tendon spring, as we imagine it occurs in animals,” Badri-Spröwitz provides. A video exhibits BirdBot strolling within the analysis group’s laboratory.
Zero effort when standing, and when flexing the leg and knee
When standing, the leg expends zero power. “Beforehand, our robots needed to work in opposition to the spring or with a motor both when standing or when pulling the leg up, to forestall the leg from colliding with the bottom throughout leg swing. This power enter is just not mandatory in BirdBot’s legs,” says Badri-Spröwitz and Aghamaleki Sarvestani provides: “Total, the brand new robotic requires a mere quarter of the power of its predecessor.”
The treadmill is now switched again on, the robotic begins working, and with every leg swing, the foot disengages the leg’s spring. To disengage, the massive foot motion slacks the cable and the remaining leg joints swing loosely. This transition of states, between standing and leg swing, is offered in most robots by a motor on the joint. And a sensor sends a sign to a controller, which turns the robotic’s motors on and off. “Beforehand, motors have been switched relying on whether or not the leg was within the swing or stance part. Now the foot takes over this perform within the strolling machine, mechanically switching between stance and swing. We solely want one motor on the hip joint and one motor to bend the knee within the swing part. We depart leg spring engagement and disengagement to the bird-inspired mechanics. That is sturdy, quick, and energy-efficient,” says Badri-Spröwitz.

Movement sequence of BirdBot’s leg; left is touch-down, then stance (the three first snapshots on the left), then mid-swing with the leg’s attribute leg flexing posture, and again to touch-down on the proper. Springs and spring-tendons are proven on prime.
Monica Daley noticed in a number of of her earlier biology research that the hen’s leg construction not solely saves power throughout strolling and standing however can be tailored by nature in order that the animal hardly stumbles and injures itself. In experiments with guineafowls working over hidden potholes, she quantified the birds’ outstanding locomotion robustness. A morphological intelligence is constructed into the system that enables the animal to behave shortly – with out having to consider it. Daley had proven that the animals management their legs throughout locomotion not solely with the assistance of the nervous system. If an impediment unexpectedly lies in the best way, it isn’t all the time the animal’s sense of contact or sight that comes into play.
“The construction with its multi-jointed muscle-tendons and its distinctive foot motion can clarify why even heavy, giant birds run so shortly, robustly, and energy-efficient. If I assume that all the things within the hen relies on sensing and motion, and the animal steps onto an surprising impediment, the animal won’t have the ability to react shortly sufficient. Notion and sensing, even the transmission of the stimuli, and the response price time,” Daley says.
But Daley’s work on working birds over 20 years demonstrates that birds reply extra quickly than the nervous system permits, indicating mechanical contributions to manage. Now that the staff developed BirdBot, which is a bodily mannequin that immediately demonstrates how these mechanisms work, all of it makes extra sense: the leg switches mechanically if there’s a bump within the floor. The swap occurs instantly and with out time delay. Like birds, the robotic options excessive locomotion robustness.
Whether or not it’s on the size of a Tyrannosaurus Rex or a small quail, or a small or giant robotic leg. Theoretically, meter-high legs can now be applied to hold robots with the load of a number of tons, that stroll round with little energy enter.
The data gained by means of BirdBot developed on the Dynamic Locomotion Group and the College of California, Irvine, results in new insights about animals, that are tailored by evolution. Robots permit testing and typically confirming hypotheses from Biology, and advancing each fields.
tags: bio-inspired, c-Analysis-Innovation

Max Planck Institute for Clever Techniques
‘s aim is to analyze and perceive the organizing ideas of clever methods and the underlying perception-action-learning loop.
[ad_2]