
{kind=link}
[ad_1]
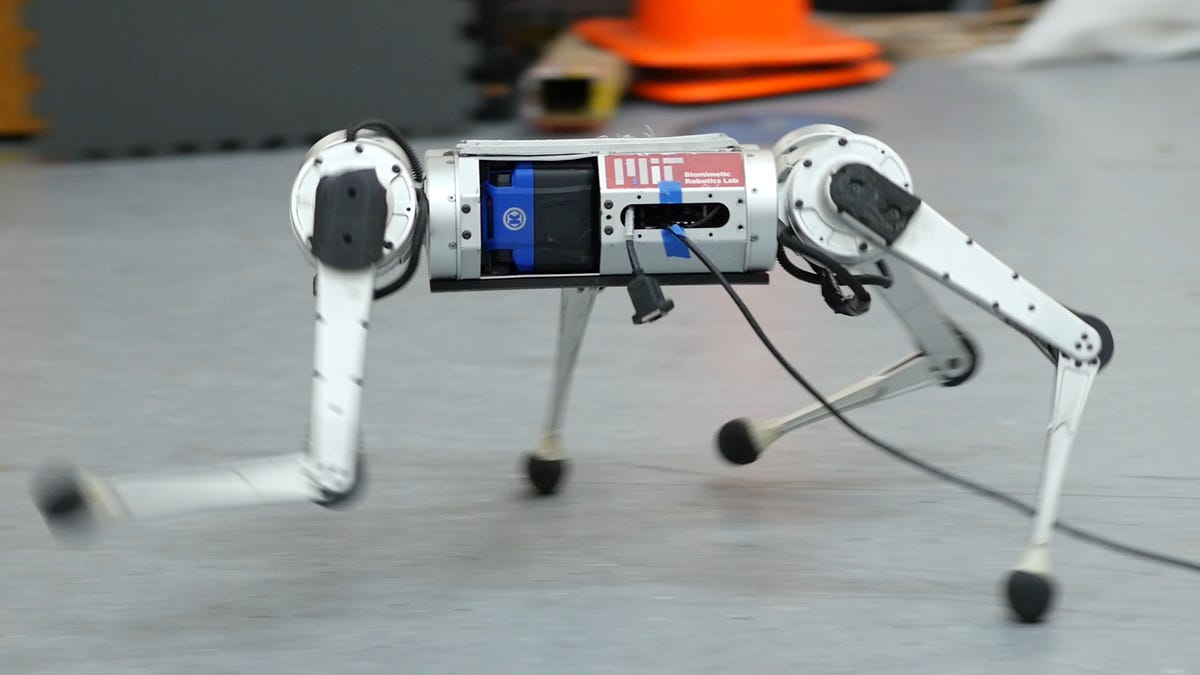
MIT
There is a new model of a really fast quadrupedal robotic from MIT’s Pc Science and Synthetic Intelligence Laboratory (CSAIL). Whereas four-legged robots have garnered no finish of consideration during the last couple years, one surprisingly quotidian ability has been elusive for them: working.
That is as a result of working in a real-world surroundings is outstandingly advanced. The short tempo leaves scant room for robots to come across, get well from, and adapt to challenges (e.g., slippery surfaces, bodily obstacles, or uneven terrain). What’s extra, the stresses of working push {hardware} to its torque and stress limits. MIT CSAIL PhD scholar Gabriel Margolis and Institute of AI and Basic Interactions (IAIFI) postdoc fellow Ge Yang just lately instructed MIT Information:
In such circumstances, the robotic dynamics are exhausting to analytically mannequin. The robotic wants to reply shortly to modifications within the surroundings, such because the second it encounters ice whereas working on grass. If the robotic is strolling, it’s shifting slowly and the presence of snow is just not sometimes a difficulty. Think about should you have been strolling slowly, however rigorously: you possibly can traverse nearly any terrain. At this time’s robots face an identical drawback. The issue is that shifting on all terrains as should you have been strolling on ice could be very inefficient, however is frequent amongst right now’s robots. People run quick on grass and decelerate on ice – we adapt. Giving robots the same functionality to adapt requires fast identification of terrain modifications and shortly adapting to forestall the robotic from falling over. In abstract, as a result of it is impractical to construct analytical (human designed) fashions of all attainable terrains upfront, and the robotic’s dynamics grow to be extra advanced at high-velocities, high-speed working is more difficult than strolling.
What separates the newest MIT Mini Cheetah is the way it copes. Beforehand, the MIT Cheetah 3 and Mini Cheetah used agile working controllers that have been designed by human engineers who analyzed the physics of locomotion, formulated poor abstractions, and applied a specialised hierarchy of controllers to make the robotic steadiness and run. That is the identical manner Boston Dynamics’ Spot robotic operates.
This new system depends on an expertise mannequin to study in actual time. In reality, by coaching its easy neural community in a simulator, the MIT robotic can purchase 100 days’ value of expertise on various terrains in simply three hours.
“We developed an strategy by which the robotic’s habits improves from simulated expertise, and our strategy critically additionally permits profitable deployment of these realized behaviors within the real-world,” clarify Margolis and Yang.
“The instinct behind why the robotic’s working abilities work nicely in the true world is: Of all of the environments it sees on this simulator, some will train the robotic abilities which can be helpful in the true world. When working in the true world, our controller identifies and executes the related abilities in real-time,” they added.
In fact, like several good tutorial analysis endeavor, the Mini Cheetah is extra proof of idea and improvement than an finish product, and the purpose right here is how effectively a robotic might be made to deal with the true world. Margolis and Yang level out that paradigms of robotics improvement and deployment that require human oversight and enter for environment friendly operation will not be scalable.
Put merely, handbook programming is labor intensive, and we’re reaching some extent the place simulations and neural networks can do an astoundingly sooner job. The {hardware} and sensors of the earlier many years are actually starting to reside as much as their full potential, and that heralds a brand new day when robots will stroll amongst us.
In reality, they may even run.
[ad_2]